


长航程漫游机器人成功完成南极实验或成未来我国南极考察重要装备
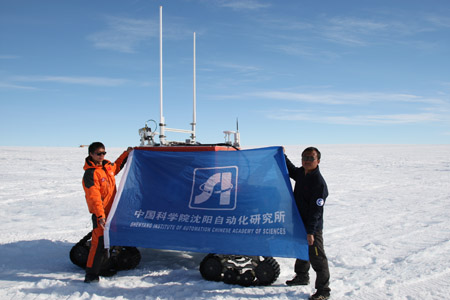

由沈阳自动化研究所研制的长航程漫游机器人成功完成中国机器人在南极的首次30公里自主行走实验后,已于近日圆满结束全部实验工作返回沈阳。目前,该机器人已初步具备应用能力,将会在未来成为我国南极科考的重要装备,进一步提升我国极地科考装备自动化水平。
此次沈阳自动化研究所机器人学国家重点实验室副研究员卜春光、博士研究生陈成作为极地机器人项目现场执行负责人一同随队前往南极进行实验,这也是沈阳自动化研究所极地机器人研究团队自2007年后第二次登上南极大陆。此次实验是对实用化长航程漫游机器人系统设计方案的初期验证。南极现场实验从2011年12月9日——2012年2月5日结束,历时59天。其间,科研人员完成了机器人行走机构、环境感知与自主控制和探冰作业载荷集成等技术的测试和验证,并完成了中国机器人在南极的首次30公里自主行走实验。据了解,根据此次南极现场的实验情况和后续工作计划安排,项目组还将在2013年——2014年,随同我国第30次南极科考队三赴南极,在南极埃莫里冰架地区正式进行机器人的实际应用实验。
在长航程冰盖漫游机器人设计中,科研人员注重自主创新,确保系统的可靠性、实用性、可维护。在机器人的本体设计中,首次采用了减震底盘、三角履带、舵轮转向、全时4驱和油动技术以解决长距离、高速稳定行走和高效驱动、能源高效利用等问题。在自主控制系统设计方面,安装了高数率、高分辨率激光传感器,并开发了自主环境感知、自主规划和控制等算法及软件,以完成机器人周围环境地形图的绘制,障碍物的识别以及规避,使机器人自主行走任务顺利完成。在机器人通讯系统设计中,还采用了铱星数据通讯技术,从而满足了远距离监控的需要。
“十一五”期间,沈阳自动化研究所在国内率先开展南极地面移动机器人技术研究与应用开发工作,并在“十二五”期间继续争取到经费支持,开展对南极埃莫里冰架600公里×100公里区域范围机器人化探测研究任务,实现南极机器人从关键技术研究、原理样机研制到科考装备设计的跨越。
开展极地科学考察对于我国具有重要战略意义。由于执行现场考察任务多数需要在野外进行,南极野外环境又极其恶劣,严重威胁考察人员的身体健康和生命安全,同时也阻碍了科考数据的获取以及科考活动的开展。长航程漫游机器人,作为典型的地面自主移动机器人,可以搭载多种科学仪器设备自主移动到指定科考区域,帮助科考人员完成气象探测、冰层厚度测量等科考作业。作为一类智能化、自动化的科考装备,可辅助和代替考察人员执行大范围、长时间、长距离的野外科学考察任务,是科考装备未来的发展方向。(一室、综合办)
附件下载:




