


沈阳自动化所硅藻微纳米机器人研究取得进展
具有自主运动能力的微纳米机器人在靶向递药领域具有广阔的应用前景,吸引了研究人员对其运动特性进行研究。然而,如何实现微纳米机器人的自主避障及精准递药是面临的挑战。研究微纳米机器人对环境的实时检测及路径规划,形成稳定的闭环控制具有重要意义。
近日,中国科学院沈阳自动化研究所科研团队研制了生物混合硅藻微纳米机器人,采用深度学习技术对硅藻微纳米机器人、障碍物和目标进行检测,实现了实时路径规划、磁场驱动、路径跟踪及靶向递送。
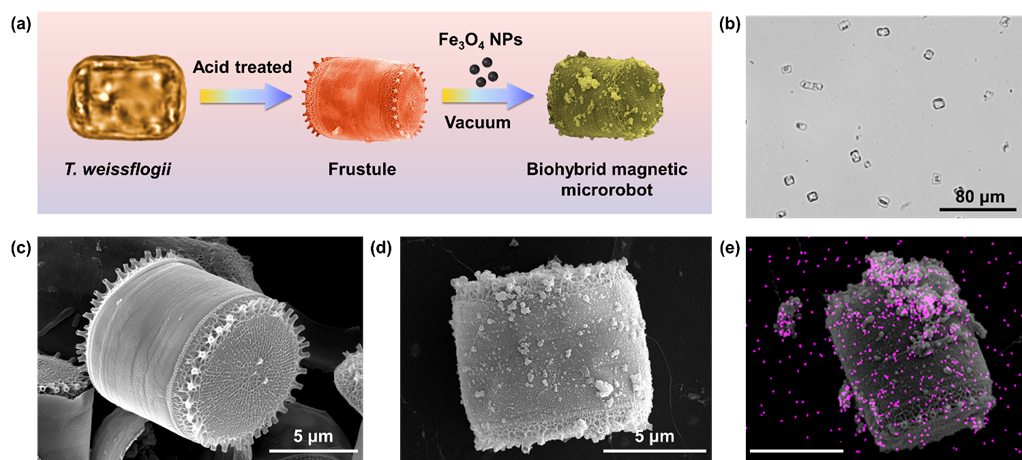
硅藻微米机器人的制备
所提出的自动控制方法中,通过深度学习来检测微米机器人、障碍物和目标,通过磁驱动系统驱动微纳米机器人运动,采用自适应模糊PID方法来跟踪机器人的轨迹,并规划出距离短且平滑的运动路径。通过实时环境检测及路径规划,实现硅藻微纳米机器人的自动避障及运动控制。
在细胞场景实验中,科研人员选择了小鼠胶质瘤细胞作为目标细胞,小鼠单核巨噬细胞作为障碍物细胞开展了实验。实验结果表明硅藻机器人能有效避开障碍物细胞并被递送至目标细胞。所提出的方法具有一定通用性,在靶向递送中具有广阔应用前景。
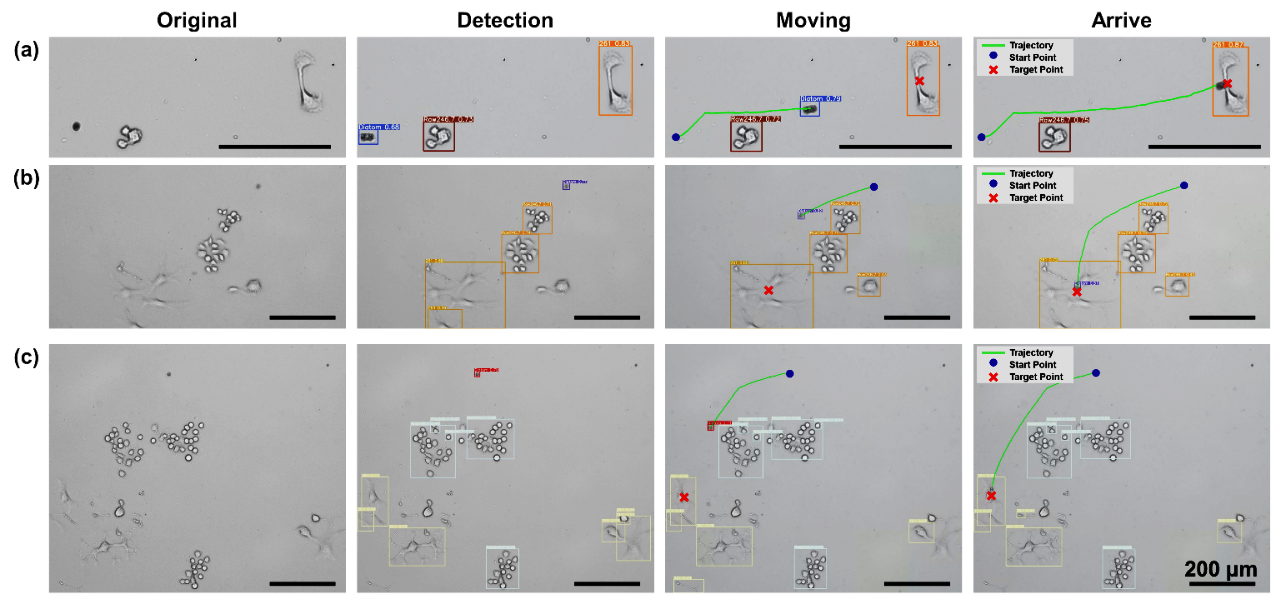
硅藻机器人在不同场景中自主避障,靶向运动到目标位置
该研究以Deep learning-based automatic control of magnetic diatom biohybrid microrobots for targeted delivery为题发表于国际机器人领域期刊IEEE Transactions on Robotics。沈阳自动化所博士生李梦月为第一作者,焦念东研究员、刘连庆研究员为通讯作者。
科研团队长期聚焦于微纳米机器人及其在生物医疗领域的相关研究,积极推动微纳米机器人和生物医疗技术的融合。该研究得到了国家自然科学基金、国家重点研发计划、中国科学院稳定支持青年团队计划等项目的资助。(机器人学研究室)
DOI:10.1109/TRO.2025.3562452
附件下载:




