


可变形生命探测机器人亮相全国地震科技创新大会

可变形生命探测机器人
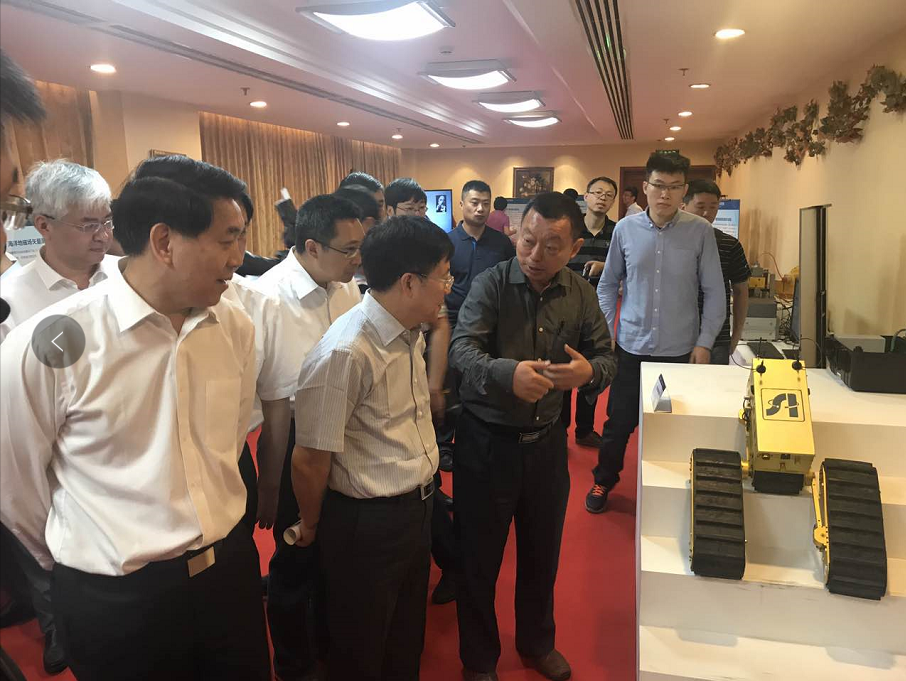
李斌介绍成果
6月7日,2017年全国地震科技创新大会在北京隆重举行。大会由中国地震局会同科技部、中国科学院、中国工程院、国家自然科学基金会联合举办。中国科学院沈阳自动化研究所研制的可变形生命探测机器人作为全国地震科技创新成果震撼亮相。
可变形生命探测机器人是“十二五”国家科技支撑计划“移动式机器人化生命探测与搜索装备研发”课题的产出成果,由沈阳自动化所、新松机器人自动化股份有限公司、中国地震应急搜救中心、中国人民解放军第四军医大学协作研发完成。该系统是针对地震发生后复杂救援环境研发的具有自主知识产权的小型生命探测机器人装备,移动机构采用模块化链式结构,保证了复杂地形通过能力。该系统融合生命探测雷达、视频、音频信息的生命探测技术,可穿透非金属材质,实现幸存者呼吸、体动生命特征的探测。该机器人最大特点是能够由狭窄入口深入废墟内部,穿透遮挡物探测幸存者,有效地提高探测深度以及作业效率,降低救援人员的伤亡。
会议期间,沈阳自动化所研究员李斌向中国科学院院士、国家自然科学基金委员会副主任刘丛强、中国地震局局长郑国光等介绍了该成果并进行了演示,领导和专家对该成果给予了充分肯定。(机器人学研究室)
附件下载:




