2018年1月8日,2017年度国家科学技术奖励大会在北京人民大会堂召开,沈阳自动化所参与的“蛟龙号载人潜水器研发与应用”项目荣获国家科学技术进步奖一等奖。
获奖证书
“蛟龙”号7000米载人潜水器是国家“十五”期间“863计划”重大专项。沈阳自动化所作为主要研制单位之一,承担了“蛟龙”号控制系统的研制和海上试验技术保障任务。控制系统团队研制了我国首套具有完全自主知识产权、性能国际领先的深海载人潜水器控制系统,为“蛟龙”号的海试成功奠定了坚实的技术基础。
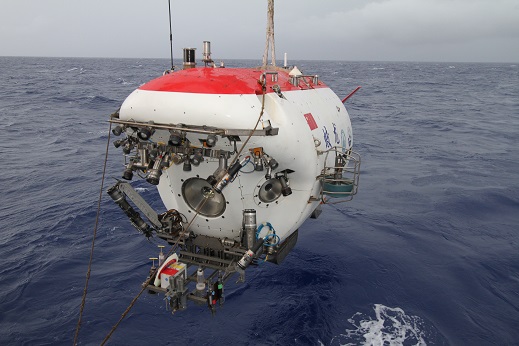
“蛟龙”号
2012年7月,“蛟龙”号顺利完成7000米级海试,最大下潜深度达到7062米,取得了国际上同类作业型载人潜水器下潜深度的最好成绩,使我国具备了在全球99.8%的海底开展科学研究和资源勘探的能力,实现了我国深海技术发展的新突破和重大跨越,标志着我国深海载人科学研究和资源勘探能力达到国际先进水平。
1958年建所至今,沈阳自动化所已走过辉煌一甲子,几代科学家造就了“献身、求实、协作、创新”的精神。十余年来,“蛟龙”号控制系统研制团队通力协作、攻坚克难,解决了诸多技术问题,确保了控制系统运行稳定可靠,秉承和发扬了这种研究所精神,诠释了沈阳自动化所创新文化的力量。
一、深海宝藏 造福子孙
地球表面积为5.1亿平方千米,其中海洋面积为3.6亿平方千米,占地球总面积的71%。我国陆地面积为960万平方千米,而海洋面积为300多万平方千米,海岸线长达1800多千米。国际海底区域总面积为2.517亿平方千米,占地球表面积的49%,蕴藏着多种自然资源,包括矿物资源、生物基因、能源资源、蛋白质等。仅在当下,全世界海洋经济的总产值就已超过10万亿元人民币,而且每年还在以平均11%的速度在增长,预计到2030年时还将增长超过两倍。在2001年5月联合国缔约国文件中明确提出,21世纪是人类向海洋进军的世纪。
党的十八大明确提出要提高海洋资源开发能力,建设海洋强国。因此发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,发展深海装备,是提高我国海洋资源开发、海底探测和深海科学考察能力,保障海洋权益,建设海洋强国的重要保证。尤其在深海蕴藏着人类社会可持续发展的战略资源,是事关国家安全发展的战略空间,更是大国博弈的重要战场。掌握深海关键技术是我国进入深海、研究深海、开发深海、确保深海安全的必由之路。之前,世界上仅有美、俄、法、日等国家拥有成套的载人深潜技术。长期以来,由于缺乏此类技术,我国认知和利用深海的能力以及对国际深海治理的主导权和话语权受到严重影响。
1999年10月,中国大洋矿产资源研究开发协会(简称中国大洋协会)先后数次组织召开“中国国际海底区域资源开发战略研讨会”、“中国深海运载技术需求论证会”和深海载人潜水器座谈会等会议,探讨我国发展深海运载装备的方略。
2001年6月,鉴于我国已成功研发了6000米级自治水下机器人,而载人深潜深度仅为600米,因此从促进深海技术装备全面均衡发展的角度出发,科技部确定“十五”期间重点研发更大深度的载人潜水器。同年12月,7000米载人潜水器总体方案通过专家评审。
2002年6月,科技部正式批准设立国家“十五”863计划“7000米载人潜水器”重大专项,同时确定4项标志性技术目标。沈阳自动化所等国内深海装备研发优势单位成为项目研制的核心骨干力量。
2003年7月,7000米载人潜水器控制系统合同签订工作正式启动。6月,根据科技部带动深海相关技术发展的要求,7000米载人潜水器重大专项公布了“水下目标自动识别与视觉定位技术研究”等5个专题指南。7月,确定深海共性技术研究专题“基于视觉的定位技术”由沈阳自动化所作为承担单位。
二、勇于创新 功能多样
在当时,美国的Alvin载人潜水器已下水近40年,法国的“鹦鹉螺号”已下水15年,俄罗斯的“和平号”已下水13年,日本的深海6500已下水11年,而我国载人深潜技术仅为600米。与国际上同类的载人潜水器相比,“蛟龙”号载人潜水器最大的特点是深度大,其设计最大工作深度为7000米;另外,“蛟龙”号未来要搭载1名潜航员和2名科学家进行科学考察作业。因此,作为“蛟龙”号“龙脑”的控制系统,其安全性和可靠性是完成预期目标的首要任务。控制系统相当于“蛟龙”号的神经系统,每条神经末梢都与其他系统“十指连心”,“蛟龙”号在海底的每一个动作都必须得到“龙脑”的指令,倘若控制系统出现丝毫偏差,后果都将不堪设想。
可以说,“蛟龙”号这颗睿智的“龙脑”是控制系统团队集体智慧的结晶,它体内流淌着纯正的“中国血统”、“科学院血统”——由沈阳自动化所自主设计、自主研制,它的创造者既有院士、也有工人,既有“80后”、也有“50后”老专家。“蛟龙”号作为国内首套载人深潜装备,控制系统的开发无现成经验可循,在封锡盛院士和总体组成员张艾群老师精心指导下,“蛟龙”号副总设计师、控制系统课题负责人王晓辉带领控制系统团队创造性地将自主水下机器人(AUV,Autonomous Underwater Vehicle)的自主控制功能与遥控水下机器人(ROV,Remotely Operated Vehicle)的人在回路的控制理念相结合,构建了大深度载人潜水器控制系统的体系结构。研制了潜水器的航行控制系统、导航定位系统、综合信息显控系统和水面监控系统等工作系统,以及数据分析平台和半物理仿真平台等辅助系统,能够实现航行控制、导航定位、综合信息显示、水面监控、水下目标自动搜索、数据自动分析与故障诊断、半物理仿真模拟和潜航员培训等功能。
2003年8月31日,国家海洋局组织专家在无锡召开了7000米载人潜水器初步设计专家评审会。评审专家组听取了初步设计工作报告和总体集成、总体性能与总布置、观通与控制、声学、结构与舾装等分系统的专项汇报。经质询讨论,专家组一致同意通过评审,并转入详细设计阶段工作。
2004年,是7000米载人潜水器控制系统进入实质性研制阶段的关键一年。2月,在北京完成详细设计评审;5月,郭威带领肖琼林、任福琳、刘开周等4名科研骨干到无锡进行技术研讨,明确了被控对象主要参数及系统间接口关系;6月至9月,航行控制、导航定位等核心算法研制开发完成;10月,半物理仿真平台搭建完成,为后续各系统总体联调提供了预演平台。在进入详细设计和加工建造阶段的同时,项目组启动了水面支持系统、潜航员选拔与培训、国家深海基地选址等工作,并提前对海上试验区域选址工作进行了布置。

蛟龙号内部
2005年3月起,控制系统开始与生命支持系统等分系统开展联调试验。4月,控制系统各项主要功能通过半物理仿真平台验证,为后续的控制算法、软件流程、系统软硬件验证和调试,提供了重要技术支撑。4月29日,沈阳自动化所在沈阳组织召开了控制系统子课题出所检测确认会议。专家组经过听取汇报、检查资料、现场测试和讨论质疑等环节后认为,控制系统子课题所内工作已经基本结束,现场检测项目和结果符合检测大纲要求,可以参加潜水器本体总装联调试验。
2005年8月11日至9月3日,沈阳自动化所郭威等4名后备潜航员和一名专家参加了由中国大洋协会组织的中美联合深潜活动。参与了美国Alvin号载人潜水器在东太平洋热液区完成了8人次下潜任务,下潜不仅取得了大量有价值的样品,而且为此后潜航员选拔和培训、潜水器海上试验规程的制定积累了经验。
三、团结协作 总装联调
2006年9月,在与潜水器总体单位702所联调的同时,控制系统与中科院声学所研制的声学系统等在北京开展了网络通信联调试验。9月25日,国外引进部件全部运抵总装现场,正式进入总装联调阶段;10月,控制系统与推进系统、液压系统在无锡702所进行联调。
2007年1月29日,声学系统、生命支持系统、潜浮与应急抛载分系统、电力与配电分系统、观通、推进、结构和舾装等系统先后完成出所检测确认,具备了参加总装联调和水池试验的技术条件。8月底,控制系统在王晓辉研究员带领下,郭威、崔胜国、崔洋、任福琳、刘曙光、祝普强、刘开周等与声学、生命支持、应急抛载和推进系统等各分系统的陆上联调试验圆满完成。10月3日起,在无锡702所开展水池试验。在近4个月水池实验期间,“蛟龙”号共完成60次水池下潜试验,先后完成了压载水箱注排水、通过计算机的4自由度推力分配、不通过计算机的3自由度推力分配、自动定向、自动定深、自动定高、悬停定位、紧急制动、坐底试验、取水样,照明灯、摄像机、水声通信、避碰声纳、声学多普勒计程仪、运动传感器、成像声纳、测深侧扫声纳、可调压载、纵倾调节、主液压源、副液压源等实验内容。控制系统团队成员共下潜56次,占本次水池下潜总次数的93.3%。
2008年3月2日,7000米载人潜水器本体达到海上试验大纲规定的技术状态,具备开展海上试验的技术条件。水面支持系统也完成1:1钢质潜水器模型的适配试验,海上试验各项技术文件通过了专家评审和组织部门的批准,完成了潜航员全部陆地培训内容,海上试验各项技术准备工作基本完成。
四、五洋捉鳖 勇攀高峰
通过全国逾百家优势单位科研院所的联合攻关,7000米载人潜水器全面完成了设计、加工、制造、总装联调等研制阶段的各项工作,完成了水池功能试验;完成了向阳红09试验母船适应性改造和锚地、码头及近海的海上试验,开展了人机磨合演练;完成了海上试验区选址工作等。
鉴于首次开展大深度载人潜水器海上试验的现实,为确保安全、万无一失,国家海洋局明确了“由浅到深,安全第一”的总原则,明确载人潜水器海上试验50米、300米、1000米、3000米、5000米水深,直至7000米水深的分阶段实施路线。
在张艾群研究员带领下,控制系统团队王晓辉、郭威、崔胜国、祝普强、刘开周等共19人次参加各个深度级别的海上试验,一方面要对控制系统进行保障,另一方面还要对控制系统在不同深度下的航行控制、设备控制、导航定位、综合显控、应急控制等分系统的功能和性能指标进行现场验证。海上试验期间,张艾群为现场指挥部成员、安全总监,王晓辉为控制部门长,郭威为水面监控部门长,刘开周为试航员,祝普强负责潜水器反馈信号监视,崔胜国负责软件技术保障。团队成员虚心学习船舶驾驶、海事气象等有关专业知识,以严肃认真的态度、严谨求实的作风、实事求是的精神,在时间紧、难度大、任务重、后方坚强保障下,出色地完成了与控制系统相关的技术改进和试验保障任务。
2009年8月6日,向阳红09船搭载着载人潜水器和96名参试人员,承载着祖国和人民的重托奔赴南海。沈阳自动化所控制系统的5项内容满足海上试验大纲规定的技术指标,经过两个多月的奋战,海上试验队员们严格贯彻“精心组织、安全第一、层层把关、责任到人”的要求,与烈日抗争、与台风周旋,与时间赛跑,连续昼夜奋战,于2009年10月19日圆满完成1000米海上试验任务,并胜利返航江阴。1000米级海试最大下潜深度达到1109米,全面验证和考核了载人潜水器的设计功能和主要技术指标,锻炼了队伍、积累了经验,为载人潜水器更大深度试验和实际使用打好基础。
2009年10月至2010年5月中旬,根据1000米级海上试验取得的经验和认识,各参试单位全面完成了对7000米载人潜水器的8项技术改进。同时,科技部社发司决定将起初的“和谐”号更名为“蛟龙”号。
2010年5月31日,向阳红09船从江阴启航,开始执行3000米级海上试验任务,于7月19日胜利返回江阴。期间,“蛟龙”号共完成了17次下潜,其中4次突破3000米,最大下潜深度达到3759米,同时完成了两名受训潜航员的水下实操培训。控制系统更换高度计后的自动定高等各项内容,满足海上试验大纲规定的技术指标。在试验过程中,“蛟龙”号多次刷新载人深潜深度纪录,并完成水下长距离巡航、近底目标搜索、标志物布放、插国旗、深海水样获取、照相、摄像、图文传输、语音通信等一系列工作,完成真正意义上的海底作业任务,初步具备了深海环境下的作业能力,充分考核了潜水器的功能和性能,提前、圆满、超额完成了预定试验计划。8月16日,科技部和国家海洋局在北京联合召开新闻发布会,正式对外宣布我国“蛟龙”号载人潜水器3000米海上试验成功的消息。
2011年海上试验的目标深度是5000米,同时海上试验任务与实际应用相结合是本次试验的重要特点。为此,试验海区选择在位于东太平洋的多金属结核勘探合同区,并纳入中国大洋航次系列管理。7月1日至8月18日,国内13家单位完成了“蛟龙”号载人潜水器5000米级海上试验(中国大洋25航次)任务。期间,在5000米海区共完成5次下潜,5次穿越4000米深度,4次穿越5000米深度,创造了最大下潜5188米的中国载人深潜新纪录,实现了较长时间按海底照相和摄像、沉积物和矿物取样、生物和微生物取样、布放标志物、海底地形地貌测量等作业,验证了“蛟龙”号的功能和性能,锻炼了海上试验队伍,为下一步7000米设计深度的海上试验奠定了坚实的基础,同时为履行国际海底勘探合同义务提供了有效数据和资料,为我国日后开展海洋科学研究和勘查应用积累了宝贵经验。
2012年6月3日至7月16日,国内18家单位圆满完成了7000米级海上试验任务。该次试验最大特点是试验海区位于密克罗尼西亚专属经济区的马里亚纳海沟,“蛟龙”号的所有部件将要经受最大设计深度的考验,同时全体参试队员需要按照联合国海洋法公约要求在他国专属经济区海域开展工作。“蛟龙”号7000米级海试共完成6次下潜,下潜深度分别为6671米、6965米、6963米、7020米、7062米和7035米,每次下潜都按预定计划和任务有效开展。本次海上试验,我所张艾群、郭威、祝普强等4人参加,主要负责验证载人潜水器控制系统7000米设计深度下的航行控制、设备控制、导航定位、综合显控、应急控制等分系统的功能和性能指标。
2012年6月24日,刘开周与其他两位试航员共同见证了我国载人深潜史上首次突破7000米的伟大历史时刻,并在7000米的海底向远在外太空中“神州九号”航天员发送了祝福。试验对潜水器本体系统、水面支持及母船系统共313项功能、性能、指标和作业内容进行了逐一验证,对一些关键项目进行了多次试验和验证。试验还取得了丰富的海底科学作业成果,包括海底沉积物样品、生物样品、地质样品和深海水样,以及大量海底影像资料和海底微地形地貌资料等。在海上试验中,通过广大参研参试队伍的实际行动,弘扬和凝练了“严谨求实、团结协作、拼搏奉献、勇攀高峰”的中国载人深潜精神。试验团队安全、圆满、超额完成了“蛟龙”号7000米级海上试验的全部试验内容,实现了全部预定目标!
五、试验应用 遨游大洋
2013年起,“蛟龙”号载人潜水器转入试验性应用阶段。我所先后派郭威、刘开周、祝普强、赵洋、崔胜国、何震、孔范东、杨鸣宇、赵兵、冀萌凡、陶祎春、王海龙、田启岩等20余人次,全航次参加“蛟龙”号试验性应用航次和中国大洋第35、37、38航次试验,圆满完成对“蛟龙”号控制系统的保障任务。
“蛟龙”号先后在我国南海、东太平洋多金属结核勘探区、西太平洋海山结壳勘探区、西南印度洋中脊多金属硫化物勘探区、西北印度洋中脊多金属硫化物调查区、西太平洋雅浦海沟区、西太平洋马里亚纳海沟区等7大海区下潜,涵盖了海山、冷泉、热液、洋中脊、海沟、海盆等典型海底地形区域,安全率实现100%,主要为国家海洋局深海资源勘探计划、环境调查计划,科技部“973”计划,中国科学院深海先导计划,国家自然科学基金委南海深部计划5大计划提供技术和装备支撑。
2014年7月,为“蛟龙”号量身定制的专用微型ROV“龙珠号”,成功搭载“蛟龙”号在西北太平洋开展水下作业,取得了“蛟龙”号水下作业的珍贵影像资料,拓展了其作业能力。
六、硕果累累 实至名归
在仅有600米载人深潜技术的基础上,国内100多家单位通过连续十余年的基础研究、技术攻关,解决了大深度耐压、深海复杂环境下精细作业技术、安全技术、可靠水声通信技术等世界性难题,成功研发了具有自主知识产权的“蛟龙”号载人潜水器,实现了我国载人深潜技术由跟跑、并跑向领跑的重大跨越。
沈阳自动化所“蛟龙”号控制系统研制团队针对深海环境下基于声学定位数据更新率低、惯性测量单元数据发散、信号滞后等难题,攻克了潜水器状态和参数联合估计技术,研发了“蛟龙”号自主导航软件系统。针对“蛟龙”号结合精细作业需求的运动模式多样、深海复杂地形及流场环境下精准操控的需求,研发了控制参数在线自动调整的航行控制方法,实现了“蛟龙”号近底自动定向、定深/定高和悬停定位等精准操控功能,其中针对作业目标精确的悬停定位功能,为国际同类大深度载人潜水器的首创。
自海上试验以来,“蛟龙”号共成功下潜158次,17个潜次作业水深超过6000米,连续大深度安全下潜。国家海洋局、中国科学院、教育部、中船重工集团等多个部委近40家单位参与其中,470余人次参与下潜,超过1000人次参航,总计历时517天,总航程8.6万余海里,实现100%安全下潜。
“蛟龙”号科学考察中获得了各种各样的海底样品,摄录了大量视像资料,取得了许多国际前沿科研成果。“蛟龙”号的研制和应用,开辟了我国深渊科学研究的新领域,建立了全国开放共享的机制,标志着中国深海载人科研和资源勘探能力达到国际先进水平,对我国深海技术装备发展产生了巨大的辐射带动作用和社会效益,为人类探索海洋、研究海洋、保护海洋做出了突出贡献。
“蛟龙”号控制系统团队获得了包括“载人深潜英雄集体”、“载人深潜英雄”、“全国专业技术人才先进集体”、“全国五一劳动奖状”、“全国五一劳动奖章”、“中国青年五四奖章集体”和国家科学技术进步一等奖等诸多荣誉和奖励。
“蛟龙”号控制系统研制任务由科技部下达,国家海洋局是“蛟龙”号海试的组织部门,中国大洋协会具体负责组织实施。我们衷心感谢各级领导、专家、同事和参试队员在“蛟龙”号控制系统研制和海试过程中给予的支持和帮助。
作者:
刘开周,男,1976年3月出生。2002年3月至今在沈阳自动化研究所学习和工作,研究员。
王晓辉,男,1968年1月出生。1998年6月至今在沈阳自动化研究所工作,研究员。曾任水下机器人研究室主任,现任工程项目处处长。